ESC設定方法 ArduPilot

参考文献
以下メモ
ESCの種類
ESCにはBLHeli32 とBLHeli_Sってのがある。
使うソフトウェア
それぞれBLHeliSuite32(BLHeli32使う場合)というソフトウェア。BLHeliSuite(BLHeli_SのESCを使う場合)というソフトウェアで設定する。
パススルー機能を使ってオートパイロットに繋いだままESCを上記ソフトウェアでいじることができる。
やり方
USB ケーブルを使用して PC をオートパイロットに接続し、地上局 (Mission Planner、QGC など) に接続
SERVO_BLH_AUTOを 1 に設定
・Mission Plannerを閉じる
・ソフト起動
・上のタブでBLHeli32 Bootloader (Betaflight/Cleanflight)を選択
・COMポート選択
・connect押す
繋がらない→最新のソフトかジャないとダメ
以上
DShotだとできることが増える
BLHeliSuite32もBLHeliSuiteも
DShotが使える
が
BLHeli32 の公式 32.7 バージョンは、 DShot をサポートしている。
が
BLHeli_S の公式バージョンは双方向の DShot をサポートしていない。
その場合は
BLHeli_S JESCからバージョンを購入するか、 BLHeli_S BlueJayを使用する必要があり
そのまま使用すると誤作動起こす可能性あるのでこれはやっておいた方が良さそう。
双方向DショットをネイティブでサポートするESC↓
FlywooF745、FlywooF745Nano
KakuteF4Mini, KakuteF7Mini, KakuteH7Mini
BeastF7、BeastF7v2、BeastH7、BeastH7v2
最低 4 つの DShot 対応サーボ出力のみを使用できます。IOMCU (Pixhawk、CubeOrange など) を備えたオートパイロットの場合、これは AUX1 から AUX4 を使用できることを意味します。独立した IOMCU コプロセッサを使用しない Pixracer およびその他のオートパイロットの場合、これは出力 1 ~ 4 を使用できることを意味します
意味わからん
これ以外のものだと設定が難しそう。
Dshot使うと何ができる?
追加のセンサー (電源モジュールや RPM センサーなど)
いらずで
パフォーマンス データの監視とログ記録が可能になり、調整や故障に対処できるようになる。
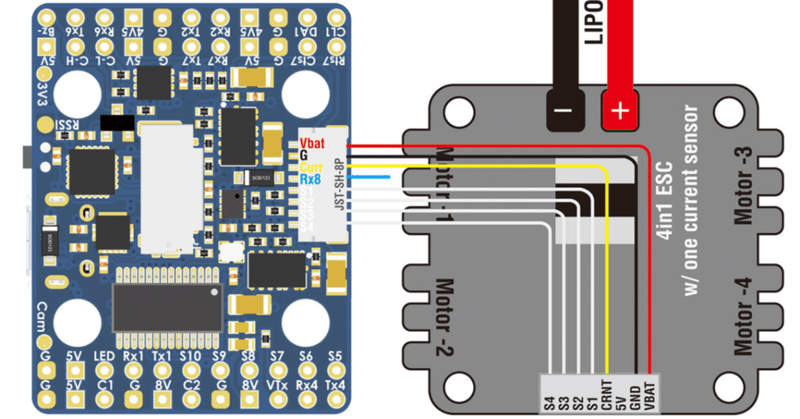
特定の ESC には、テレメトリ経由で送信される特定のセンサーのデータがある場合とない場合があることに注意。4 in 1 ESC が電圧および電流センサーを提供するのは一般的ですが、テレメトリー経由ではなく、オートパイロットへの直接接続によってデータを送信する。←どういうこと?
ESCにテレメトリ出力がある場合、自分でFCのSERIALxに繋ぐ(4本とも)
設定方法
・SERIALx_PROTOCOL 16 (= ESCテレメトリ)
にして認識させてやる
通常いじる必要なし。
・SERVO_BLH_POLES のデフォルトは 14
意味は
モータの極数
通常いじる必要なし。
SERVO_BLH_TRATE のデフォルトは 10
意味は
10Hz の更新レートでテレメトリ
SERVO_BLH_BDMASK : BLHeli32 または BLHeli_S 双方向 DShot サポートを有効にするために使用されるビットマップ。IOMCU のないフライト コントローラでは、これは通常 15 に設定され、4 つのアクティブなチャネルを示します。IOMCU を備えたフライト コントローラでは、これを 3840 に設定して、4 つのアクティブな AUX チャネルを示すことができます (双方向 DShot は AUX 出力でのみ機能します)。
↑ここむずい
IOMCUってなんだ?
AUXを4つ使って指示してあげる必要がある場合がある。
できること
★ログで
RPM
電圧
現時点の
温度
総電流
がみれるようになる。
★MPでリアルタイムで見れるようになる
Statusページの
esc 1_rpm
んとこ
★OSDでモニターできるようになる
(一部)
★バッテリーをモニターできる
例えば BLHeli32 ESCタイプの場合
BATT2_MONITOR = 9
に設定
電圧が平均化され、電流が合計され、消費電流が累積される
この記事が気に入ったらサポートをしてみませんか?