ドローン開発を志すエンジニアへのチュートリアル!ソフトとハードから見るドローン産業の現在地 〜 #SOLMU night vol.2 レポート〜

ドローンは着実に産業として根付いてきている。
コロプラ元代表取締役副社長の千葉功太郎氏が2017年6月にドローン特化型ファンドを立ち上げ、2018年7月には2号ファンドも立ち上がり、新しいサービスを開発するだけでなく、広めるための土壌が整いつつある。また、DJIをはじめとしたドローンメーカー側が開発者向けに提供するSDK等を充実させはじめ、ドローンを活用したサービス開発環境も整備されてきている。
SOLMUはこのような環境変化に着目し「ドローンサービス開発チュートリアル」題して、ドローン産業の現在地を伺いながら、エンジニアがドローン領域での新しいサービスやプロジェクトを生み出すきっかけとして「ソフトウェア開発入門」「これからのハードウェア開発」というテーマで、ドローンスタートアップのトップランナーであるCLUE社 榊原知也(さかきばら ともや)氏と、エアロネクスト社 大河内 雅喜(おおこうち まさき)氏にお話いただいた。
CLUE流「ドローンソフトウェア開発入門」
CLUE榊原氏は「ドローンはあくまでも社会課題を解決するためのツール」と強調する。
CLUE株式会社 COO 榊原知也氏
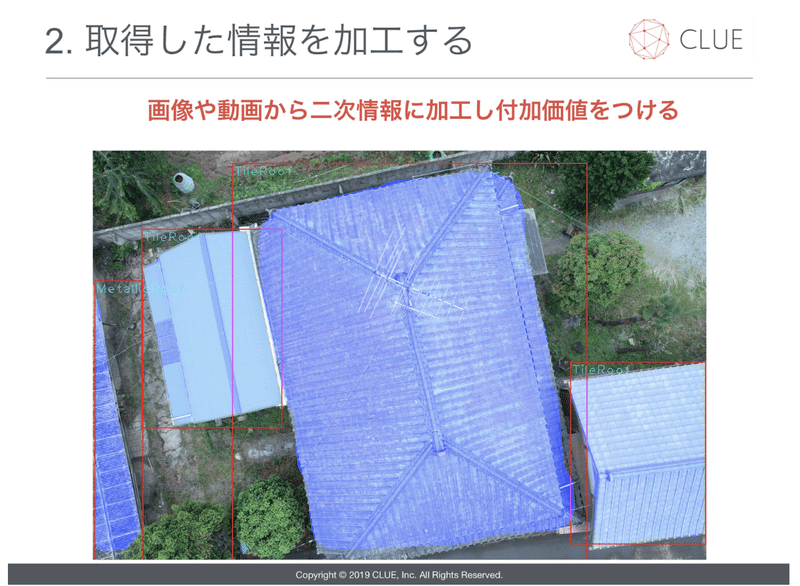
CLUE社は、ドローンのソフトウェアにより「ドローンが当たり前に飛び交う社会」を創ることをビジョンと掲げている。近年では屋根の点検サービスとして、iPadの操作のみで簡単にドローンを操作できる「DroneRoofer(ドローンルーファー)」の開発と展開に注力している。清水建設がガーナで実施する大型土木工事案件にCLUE社のドローンシステムを取り入れたニュースもある。
ドローンによる屋根点検サービス「DroneRoofer(ドローンルーファー)」開発動画
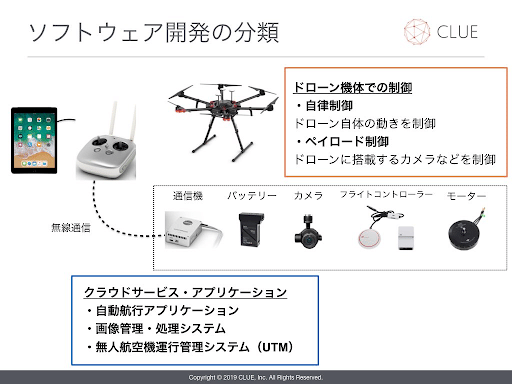
「ドローンのソフトウェア開発」は主に2つの領域から構成される。1つ目はドローンの機体制御に関するシステム開発。2つ目は自動航行管理やドローンで取得したデータの分析を行うクラウドサービス・アプリケーション開発である。
ドローンの機体制御を行うフライトコントローラーSDK
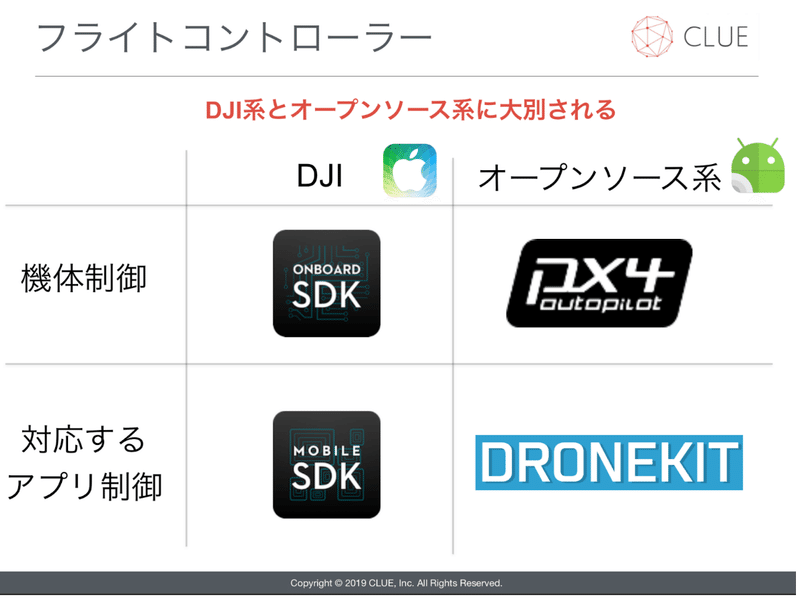
ドローンの「フライトコントロール」を行うためのSDKは2つに大別される。ハードウェアで圧倒的なシェアを持つDJI社が提供するものとオープンソース系。これはモバイル端末のOSで例えるとイメージがしやすい。DJI社製のソフトウェアはiOS、オープンソース系の制御ソフトウェアはAndroidのようなものである。開発の目的に応じてこれらのSDKを活用していく。
外的要因を考慮したソフトウェア開発
flightController.startTakeoff {}例えば、iOSで実際にドローンを離陸させるには、このコマンドを一つ入力するだけで良い。しかし、ドローンソフトウェア開発、特に機体制御の部分では、風、GPS、コンパスなどの様々な外的要因に起因する事象に対応しなくてはならない。
「屋外で動作するハードウェアが持つ特有の外的要因を考慮してプログラムを設計する必要がある。この点が、所謂WEBサービスと最も大きな違い。そのために事業に耐えうるレベルでの実装は難易度が高いがチャレンジングでわくわくする開発」だと榊原氏は強調する。
ドローンの機体から取得できる情報は、
・リアルタイム映像
・位置情報・高さ
・GPS状況
・風の状態
などがある。
ドローンから取得可能な情報をもとにどのように制御するかは開発者に委ねられる。
「実際に飛ばしてみないとわからないことも多い」ため、CLUE社は飛行許可を事前に得た上でオフィスビルの屋上をデバッグの場所として利用している。「テスト開発の段階ではドローンが飛んでいかないように紐を結ぶこともある。」とTipsも出た。
ドローンソフトウェア開発に特別なスキルがいるか?という問いに対して、
「iOSやAndroidでのアプリ開発の経験があれば大丈夫。実際にモノが動くので、ハードウェアが好きな人はとても楽しい。」と締め括った。
既存の機体性能を突破するハードウェア開発
株式会社エアロネクスト 空力研究所 上席研究員 大河内 雅喜氏
エアロネクスト社は、ドローン機体のフレーム設計を基本から見直し、新しい設計思想のもと機体開発を行うスタートアップ。製品化やサービス化されていないものの、最近では、「ICCサミットFUKUOKA2019」の「カタパルト・グランプリ」で第2位、B Dash Camp 2018「PITCH ARENA」での優勝をはじめとして、国内の著名ピッチコンテストで数々の入賞実績がある。
「既存のドローン機体の性能限界を突破し、ドローンができることをもっと増やしていく!」と、力を込めて語るエアロネクスト社の大河内氏。日本空輸のジェットエンジン部門のエンジニアとして活躍した背景がある「空力」のエキスパートだ。
独自発明の重心制御技術「4D Gravity(R)」
ハードウェアとしてのドローンの性能は、「耐風性」「安全性」「飛行時間」「飛行速度」で決まる。
上記の性能を改善するアプローチは、「ソフトウェア」「ハードウェア」「要素技術」のいずれかを改善する必要がある。
これまでのドローンサービス開発は、これらの性能を「ソフトウェア」を用いて改善しようとしてきた背景があるが、エアロネクストはハードウェアのアプローチからドローンの基本性能を向上することを目指している。
ドローンの「機体フレーム」は過去30年を見てみてもほとんど変わっていない。根本的な機体の構造を変えない限り、ドローン産業の進化はないと考えている。
そこでエアロネクストが発明したのが、機体制御する上で重要な重心の位置を最適化できる重心制御技術「4D Gravity(R)」。従来のドローン機体と比較し、4D Gravity(R)を搭載した機体は”軸”がブレにくい。
【次世代ドローン】4D Gravity(R)搭載「Next」シリーズ動画
ドローンの機体は、飛行部(プロペラ、モーター、アームなど)と搭載部(カメラや荷物の設置部)の2つに大別できる。4D Gravity(R)は、飛行部と搭載部を物理的に切り離すことで、機体バランスの安定と従来にない動きを可能にしている。これにより「軸がぶれない」飛行が可能になり、最終的にはラーメンを運ぶことができるような機体設計を目指している。
エアロネクスト社の技術を取り入れたドローンは、機体の中心にある縦棒を軸とした「貫通ジンバル構造」が特徴である。このジンバルの搭載によってモーターの消費電力量が効率化し、飛行継続時間やモーターの耐用年数も向上を見込めるそうだ。
目指すビジネスモデルはドローン機体の「Intel」
エアロネクストは社内に「CIPO」(最高知財責任者)と呼ばれる役職が存在し、戦略的な特許ポートフォリオを構築している。4D Gravity(R)以外にも多様な特許を有しており、将来的なマーケットや事業セグメント毎にジョイントベンチャーを設立し、収益化を図っていく構想を持っている。また、Intel Insideのように4D Gravity(R)をライセンス化して海外に展開していくことでも収益化を狙っていくようだ。
ドローン産業は「空の産業革命」と呼ばれて久しく経つ。飛行許可や安全対策などの法的、行政的な壁がありながらも、予測が難しい自然環境などの外的要因を考慮したソフトウェア開発も進歩を見せ、既存の機体性能の限界を突破する新しいハードウェア開発の設計思想も誕生している。「ドローン産業」が着実に芽吹きつつあり、その「芽」を大木にするため、多くの「エンジニア」が必要とされている。
文責:石塚 健朗
SOLMUコミュニティ担当。学生時代よりVC等でスタートアップや大手企業の新規事業創出支援。面白法人カヤックや日本テレビを経て職業発明会社KIUAS創業。複数のプロスポーツチームで試合演出を統括。SCRAP社のプロデューサー。
この記事が気に入ったらサポートをしてみませんか?