
都における自動運転に関する取組をご紹介します!part2

はじめに
現在、デジタルサービス局では、西新宿エリアにおける自動運転移動サービスの早期事業化を目指し、プロジェクトの公募を行っています。
♢5Gは自動運転にも有効
現在、普及が進む第5世代移動通信システム(5G)は、高速・大容量、低遅延、多数同時接続という特長があります。自動運転は、複数の車両との間で、大量の情報を高速かつ瞬時にやりとりする必要があるため、5Gを活用することで、より高度なシステムを実現することができます。西新宿エリアは、都が「スマート東京先行実施エリア」の1つとして先行的に5Gを整備しているエリアであることから、高度な自動運転移動サービスの実現に有望なエリアです。
このプロジェクトは、昨年度も実施しています。今回の記事では、昨年度のプロジェクトの内容についてご紹介いたします。
なお、以前に東京都の自動運転に関する取り組みをご紹介する記事を公開していますので、こちらもご覧ください!
(2021年7月21日掲載)「都における自動運転に関する取組をご紹介します!」
昨年度のプロジェクトについて
昨年度は、西新宿エリアにおいて2件の自動運転プロジェクトを行いました。
(昨年度プレスリリース)
①京王電鉄バス(株)によるバス型車両での自動運転運行
使用車両:日野ポンチョ
②大成建設(株)によるタクシー型車両での自動運転運行
使用車両:JPN TAXI 匠
前述のとおり、西新宿エリアは、先行的に5Gの整備が進み、高度な自動運転移動サービスの実現に有望なエリアです。一方で、同エリアは、新宿西口を中心に地下エリアが存在するとともに、高層ビルも立ち並んでいるため、自動運転に必要不可欠なGPS電波が取得困難な箇所が多く、チャレンジングな環境にあることも事実です。
①京王電鉄バス(株)によるバス型車両での自動運転運行

〇走行ルート

主な検証項目
〇5Gを活用した遠隔監視
5Gを活用することで、通信のタイムラグを小さくし、余裕をもってブレーキ行動に入れるかなどの検証を行いました。
5G通信が可能な箇所、LTE通信(4G)の箇所のそれぞれにおいて、車両に設置したカメラで撮影した画像を遠隔監視端末に送信し、タイムラグを計測しました。その結果、LTE環境では2秒ほどのタイムラグがあったところを、5G環境では0.7秒ほどのタイムラグまで短縮することができました!
〇運賃収受方法の検証
将来的に無人運転が実現した場合、乗務員がいないため、乗客から確実に運賃を受け取る方法の確立が必要となります。そこで、顔認証技術を駆使した運賃収受方法を検証しました。
プロジェクトでは、一般の方々を対象にモニター(試乗者)を募集しましたが、募集に当たっては、事前にLINEにより顔写真を登録していただき、乗車時に、車内に設置した顔認証端末を用いて、登録した本人かどうかを識別しました。今回は運賃無料で検証を行いましたが、実際に運行するときには、本人認証にあわせて運賃の収受を行うことを検討しています。
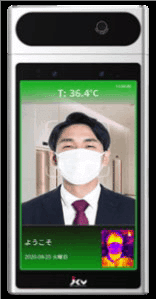
マスクを着用していても高精度で認識を行うことができました!
登録済みの乗客572名のうち、認証できなかった乗客はわずか8名で、認証率は、98.6%を達成しました。また、約80%のケースにおいて、自動改札機の通過速度よりも速い1秒以下で認証されました。さらに、年代に関係なく、約95%のお客様から利用しやすかったとの意見をいただきました。
②大成建設(株)によるタクシー型車両での自動運転運行
〇走行ルート

主な検証項目
〇信号情報の取得
交差点は自動運転が困難な場所の一つです。信号機の色の変化を早く認識できないと急停止・急発進となり、乗り心地に影響があるばかりか、事故にもつながり得ます。
そこで、交差点での走行性・安全性を高める取組として、「信号機の色の情報」と「信号機の色が切り替わるまでの残秒数」の2つの情報を信号機から取得し、自動運転車両に送信することで、車載センサーで信号機の色を認識する場合と比べて、どれぐらい早くシステムが信号機の色の切替わりを認識することができるかを検証しました。
システムによる信号機の色の認識が早まると、よりスムーズで安全な発進・停止が可能になります。信号情報の取得は、警察庁・警視庁の許可を得て実施しました。
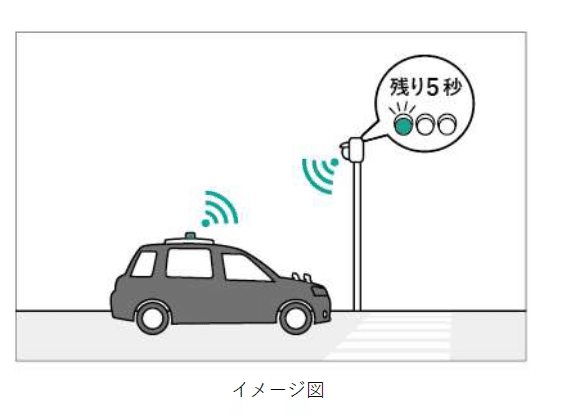
検証の結果、
信号情報を車両に送信する場合のほうが、車載センサーで認識する場合よりも、1秒程度早く認識することができました。
〇ロータリー発進時のセンサー情報(危険情報)の取得
新宿駅西口のロータリーでは、駐停車車両やカーブ部分により車載センサーの死角となってしまう(情報が取得できない)部分が多く、発進・走行などの安全面に課題がありました。そのため、道路脇にセンサー(インフラセンサー)を設置し、車載センサーでは見えない部分の情報を車両に送り、安全に発進できるかの検証を行いました。
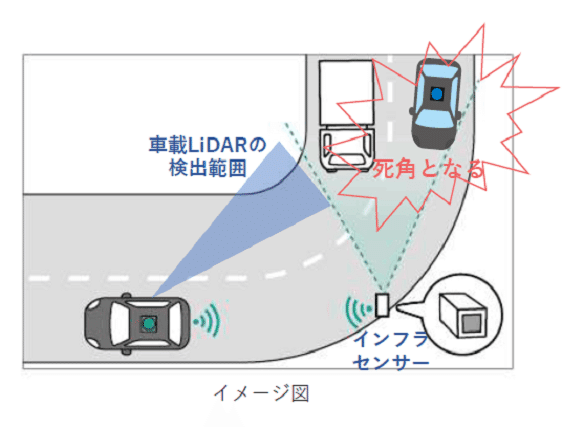
具体的には、ロータリーから発進する際に、インフラセンサーからの危険情報を受信しているか否かを確認したうえで、発進しました。
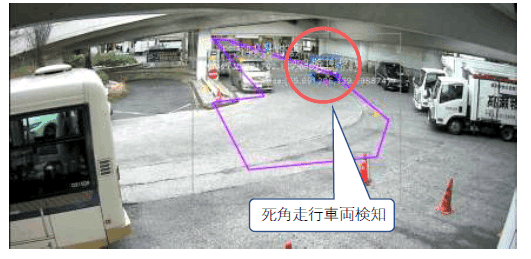
→危険情報を受信
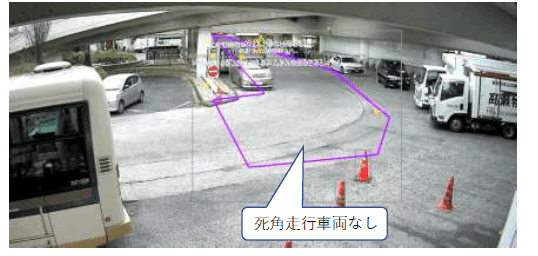
→危険情報を解除
結果として、インフラセンサー情報の送受信に問題はなく、安全に発進・走行することが確認できました。
▷おわりに
今年度のプロジェクトでは、昨年度のプロジェクトで明らかになった技術的課題の解決と事業採算性の検証を行う予定です。ぜひご期待いただければと思います!