#02 しろた君は上手にカップを持てるかな

こんにちは。Robot Stand Cafe(ロボットスタンドカフェ)のマスコット、RoSCa(ロスカ)です。今回はしろた君を動かしてみた話ですよ。それでは、本編をどうぞ〜。
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
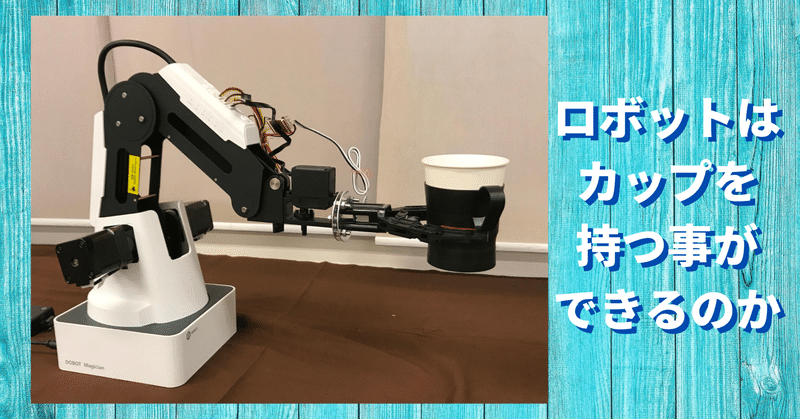
早速、ネットでぽちったロボット、しろた君を動かしてみることにしました。
このロボットにはパソコンからコントロールできるソフトがついていて、USBで繋ぐだけですぐにロボットを動かしてみる事ができるんです。直感的に操作できるので動かしてみるだけなら直ぐにできます。ゲームコントローラみたいなものも付いているので、ゲーム感覚でロボットを動かすことも可能です。
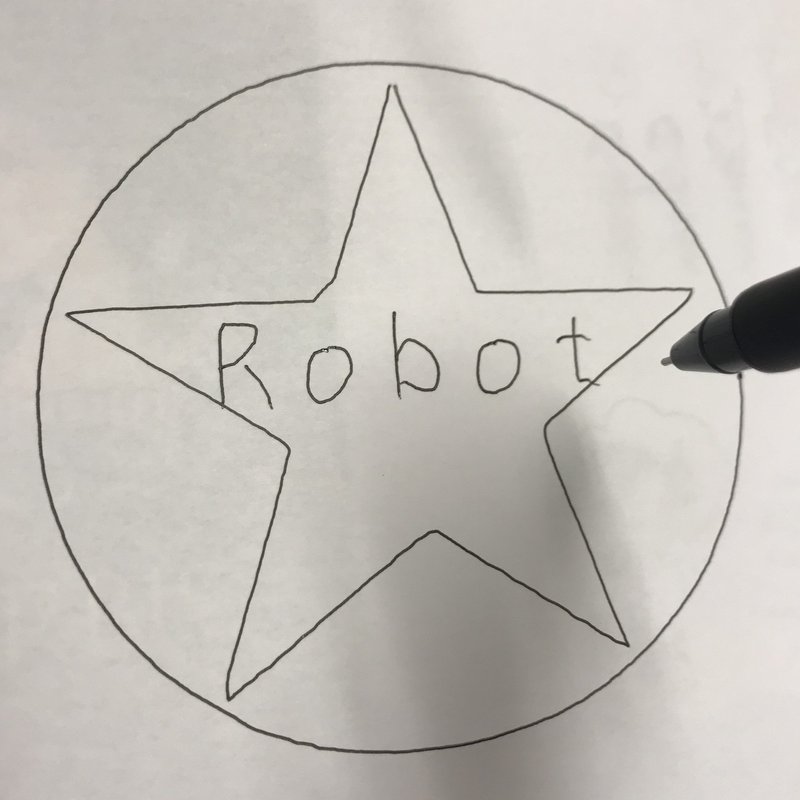
マニュアルもあるので、こんな風にペンを持って絵や字を書くことだってすぐにできるようになります。
付属品には、ペンの他にグリッパー、人でいう手にあたるパーツや、吸盤のようなもので吸着するパーツなどが付いていました。しかし、困ったことにグリッパーの力が弱くて、上手にカップを持ち上げる事ができませんでした。
さて困りました。発注する前にうっすらそんな予感はしていたので、次の策は考えていましたが、付属のパーツが使えないのは痛手です。
考えていた策というのは、U字のアームにカップを引っ掛けるという物です。持てなくは無いのですが、なんとなく不安定な感じがしますし、なんだか不格好です。それもそのはず、U字の部分は素人であるエンジニアの手作り。左右対象ですらありませんし、手作り感が満載すぎて格好よくありませんね。

もう少し格好良くできないかなぁとネットで調べていたら、良い感じのグリッパーを発見しました。ただ、このグリッパーは今回買ったロボットの付属品では無いため、取り付けやコントロールは自分で作らなければいけません。
そこはできる気がしたので、試しにやってみることにしました。
そもそも、違うロボットにつけるグリッパーなので、当然アタッチメントの形が合いません。
そこで、小さなアルミプレートにドリルで穴を開けて、しろた君とグリッパーに取り付け、無理やり繋げるという荒技を使ってみました。
案外うまく取り付けられました。1台だから頑張れましたが、これ以上はもう懲り懲りです。もっとうまい方法を考えないと量産は無理そうです。
グリッパー自体も結構重量があるので、コーヒーを入れたカップを持つとどのくらいの重量になるのか。
しろた君のペイロード、つまり持てる重量は500gなのでグリッパーも含めて持つ物の重さを500g以内にしなくてはいけません。
元々紙コップの予定だったのでカップの重量はほとんど意識しなくていよいのが幸いといった所でしょうか。
せめて1kgくらい持てるロボットだったら、もっと用途も考えられるのですが。価格重視で選んだので仕方ありません。
これでも、この価格帯のロボットにしては力持ちなんです。

そして、このグリッパーは可動式。つまり指の部分が閉じたり開いたりするのです。その制御をロボットにさせなくてはいけません。どうやるかというと、ロボットのアーム部分にある端子から信号を出力してそれをグリッパーに電線で繋げば良いのです。
アームの端子から信号を出すのもパソコンの付属ソフトから簡単にコントロールできます。
ソフトにblockyという命令をブロックで書くツールがあるので、プログラミングの知識がなくても直感的に書く事ができます。
EIO04とかEIO05と言うのが、アームから信号を出力する端子の名前です。
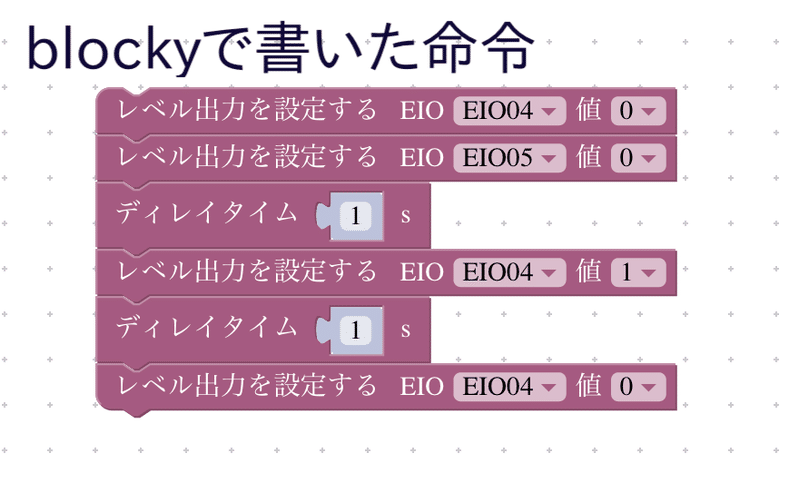
もともと電気回路の知識はあったので、昔の記憶を頼りに、なんとか動かす事ができました。
どんな信号を送ればグリッパーが動くのかと言うのは、仕様書に書いてあります。ただ、ロボットから直接グリッパーを動かすにはパワーが足りなかったので、間にパワーを増幅させる回路を足しました。持っててよかった回路の知識。
そんなこんなで、しろた君にコーヒーカップを持たせる事ができるようになりました。
次回はいよいよ、しろた君がバリスタに挑戦しますよ!
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
Robot Stand Cafeを「応援したい!」と思った人はフォローお願いします!一緒に楽しい未来を想像して、創造しましょう。
この記事が気に入ったらサポートをしてみませんか?