
OpenAI Gymの様々な学習環境

OpenAI以外から提供されているサードパーティ製の「OpenAI Gym環境」を紹介します。
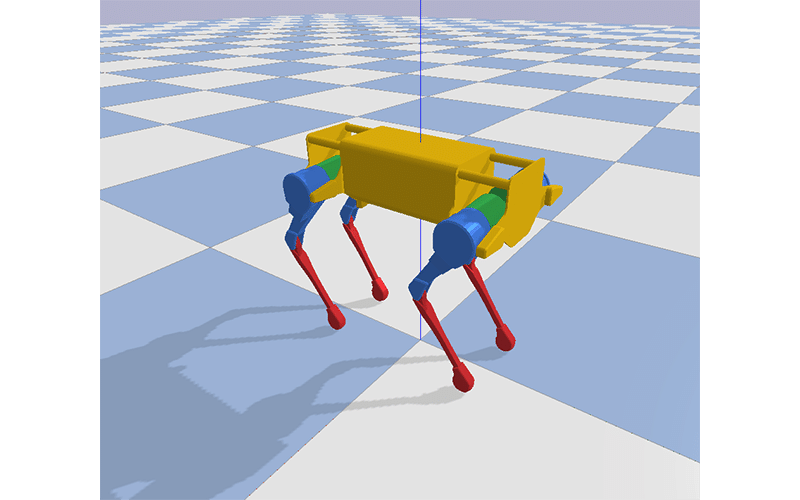
1. PyBullet Robotics Environments
MuJoCo環境に似た3D物理シミュレーション環境です。物理エンジンにオープンソースの「Bullet」を使用しているため、商用ライセンスは不要です。
2. Obstacle Tower
AIエージェントが自動生成されたタワーを、可能な限り高い階まで登ることを目標とした環境です。

3. PGE:Parallel Game engine
AIシミュレーション用のFOSS 3Dエンジンで、Gymと相互運用できます。最新の3Dグラフィックスを備えた環境が含まれており、物理エンジンにBulletを使用しています。
4. gym-inventory
AIエージェントが在庫管理の問題で遭遇する可能性のある個別の状態および行動空間を備えた環境です。
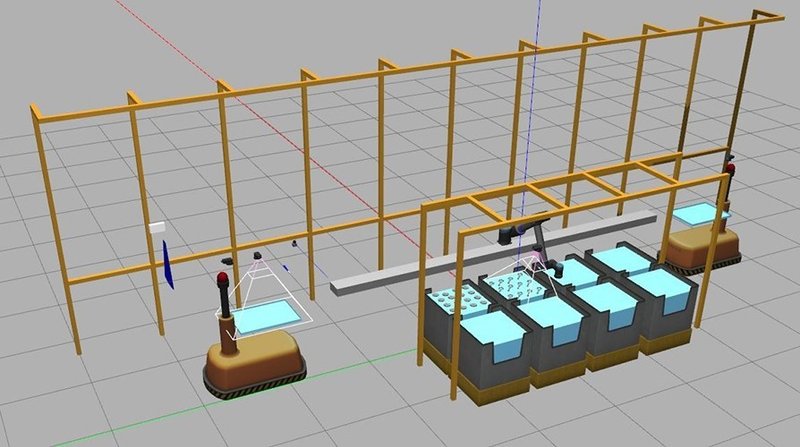
5. gym-gazebo
「ROS」と、高度な3Dモデリングおよびレンダリングツールである「Gazebo」を使用した、ロボット工学向けの環境です。
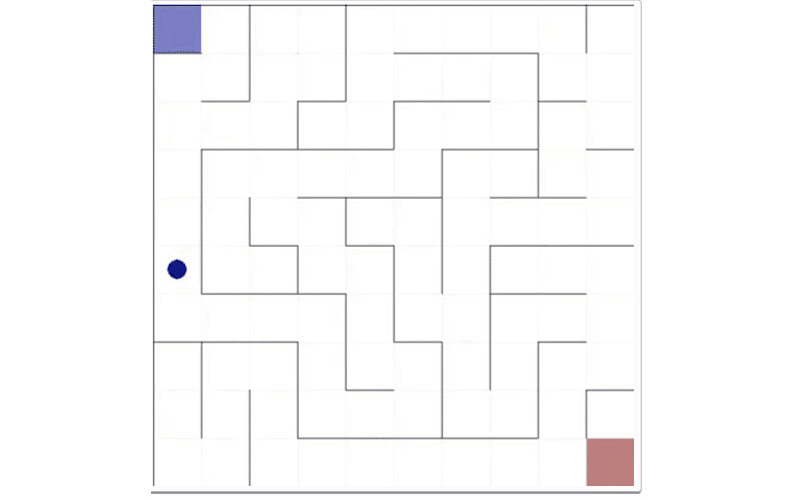
6. gym-maze
エージェントが開始位置からゴールまでの道を見つける単純な2D迷路環境です。
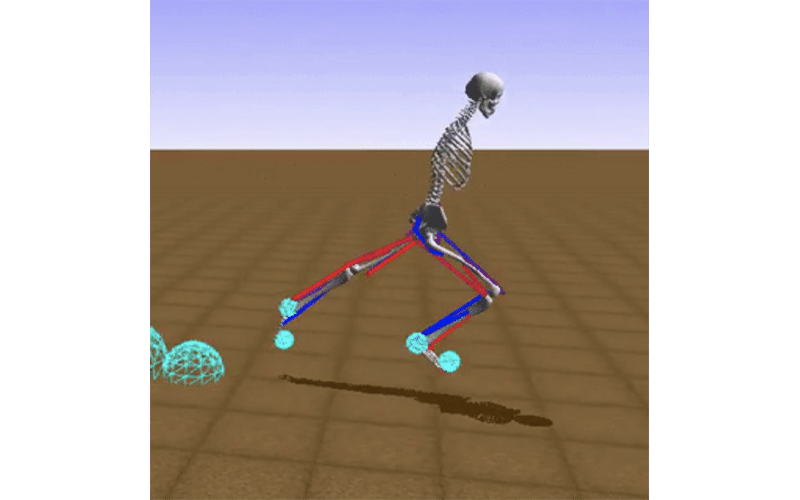
7. osim-rl
人間の筋骨格モデルの物理シミュレーション環境です。このフレームワークの環境の1つは、NIPS 2017チャレンジの競技環境でもあります。
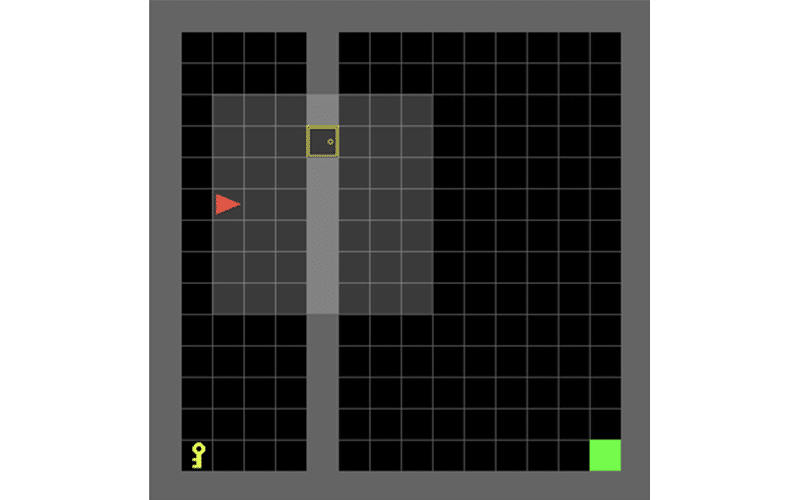
8. gym-minigrid
最小限のグリッドワールドの環境です。ソフトウェアの依存関係を最小限に抑え、簡単に拡張し、より速い訓練のために優れたパフォーマンスを提供するよう努めます。
9. gym-miniworld
MiniWorldは、強化学習とロボット研究のためのミニマルな3Dインテリア環境シミュレーターです。部屋、ドア、廊下、さまざまなオブジェクトを含む環境をシミュレートするために使用できます(例:オフィスおよび家庭環境、迷路)。MiniWorldは、VizDoomまたはDMLabの代替として見ることができます。Pythonで100%記述されており、簡単に変更または拡張できるように設計されています。

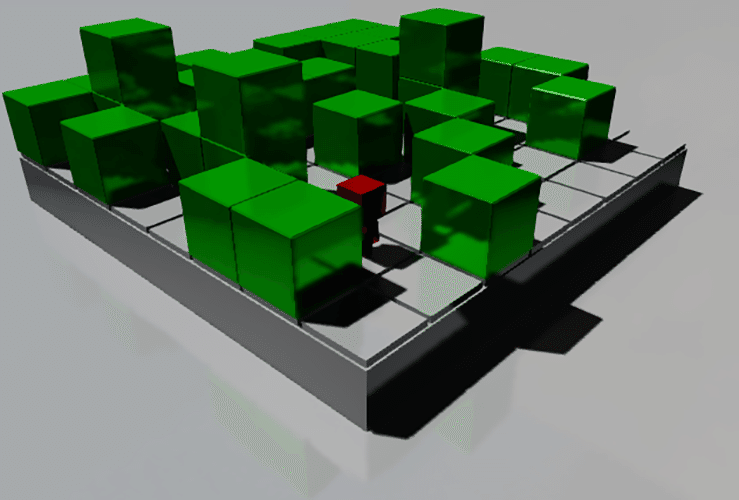
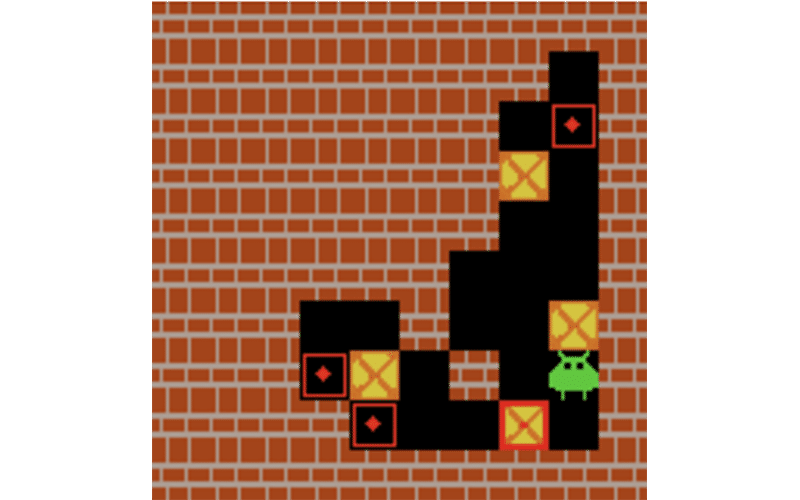
10. gym-sokoban
倉庫の保管場所にすべての箱を運ぶ倉庫番の環境です。この環境の利点は、初期化またはリセットされるたびに新しいランダムレベルが生成されることです。これにより、定義済みレベルへの過剰な適合を防止できます。
11. gym-duckietown
Duckietownプロジェクト(小規模自動運転車コース)用に構築された車線追従シミュレータ環境です。

12. GymFC
ニューロフライトコントローラーを合成するためのモジュラーフレームワークです。このアーキテクチャは、デジタルツインの概念を統合して、訓練されたポリシーをハードウェアにシームレスに転送します。OpenAI環境は、世界初のオープンソースニューラルネットワークフライトコントロールファームウェア「Neuroflight」のポリシーを生成するために使用されます。

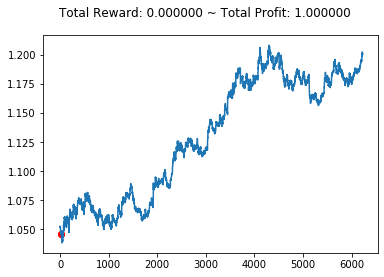
13. gym-anytrading
強化学習ベースのトレーディングアルゴリズムのための環境のコレクションです。シンプルさ、柔軟性、包括性に重点を置いています。
14. gym-donkeycar
オープンソースのAIかー「Donkycar」用のシミュレータの環境です。

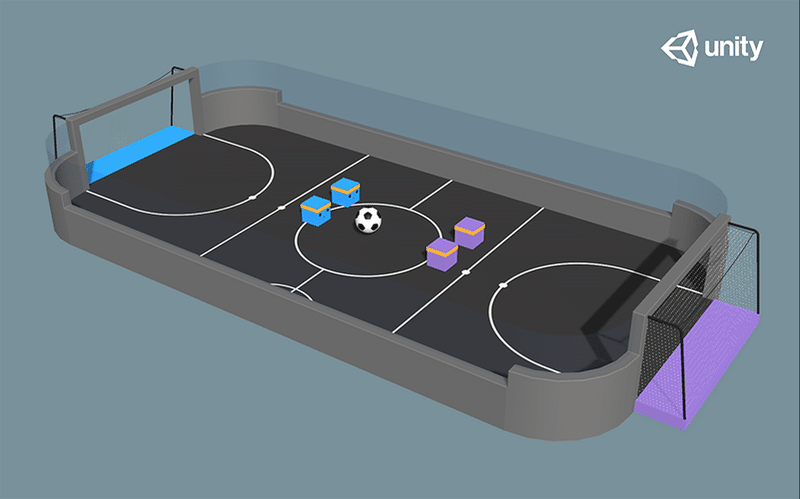
15. Unity ML-Agents
Unityで強化学習を行うためのフレームワークです。Unity ML-Agents Gym Wrapperを利用することで、Gym環境として利用することができます。
16. MarLÖ
マインクラフトのタスクに挑戦する環境です。
この記事が気に入ったらサポートをしてみませんか?