
感覚的に体を動かしてデザインする試み①

今回は、EMARF学生アンバサダーとして取り組んでいる地獄組取付プロジェクトと関連して、株式会社DIXのオフィス3階で使用される家具の中でも「作業着掛け」を制作していく。
*本記事にて、参加型ワークショップに触れていますが、愛知県内でコロナウイルス感染者が急速に増えているためワークショップの実現まで至りませんでした。そこで一部のメンバー間のみで行っています。
0. クライアントからの依頼
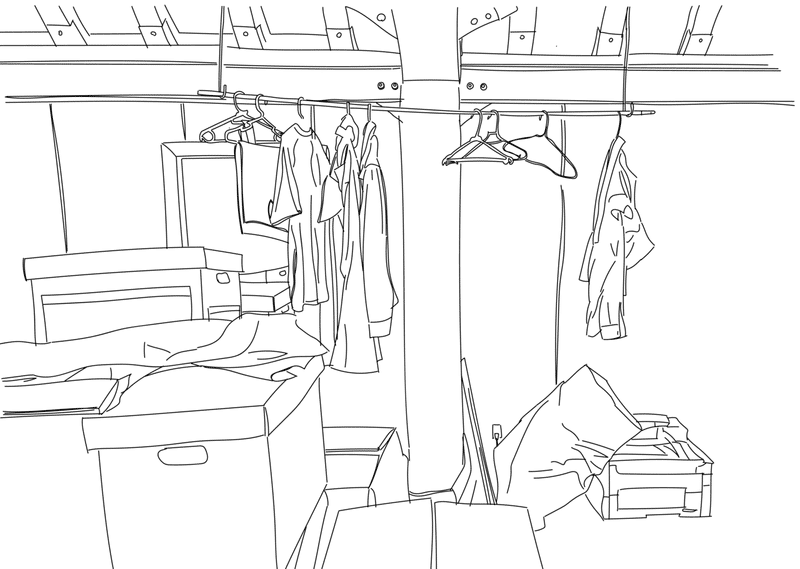
オフィス3階にある屋根から吊るしたパイプにハンガーがかかっている簡易的な作業着掛け。近頃は不足しているため、あちこちの壁や置かれている地獄組などに引っ掛けてある。
こういった現状も踏まえ、株式会社DIXのオフィス3階の作業着掛けを制作していく。
1. 発想の動機
やりたいこと
オフィスの社員さんが使用する作業着かけを作りたい
「形」を幾何学やパラメトリックな形態にしたい
利用者(DIXの社員さん)が参加型形式でデザインを決められるようにする
まず手元にあった「Parametric Design with Grasshopper 建築/プロダクトのための、Grasshopperクックブック」(石津優子+堀川淳一郎)をパラパラとめくっていた。その中でP.521にある「OSC」の章「ブリッジング」ではprocessingでの図形の描画の変化に応じて、OSC通信を介してインタラクティブにモデルが変形しているのを見たことが発想の起点だ。
#アイデアブレスト #ND3M #EMARF
— MEDY (@408321date) July 24, 2020
参加型の家具デザインにするために、感覚的に楽しくパラメーターを操作したい
光か加速度センサーでコントローラー作ってクルクル回しながら形を変えたい
gh-processingは堀川さんの本参照
あとはarduino-processingで‥…と思ったけど、Firefly使えば良いのでは pic.twitter.com/oT3fW9Wf5u
そこで「参加型」ということで社員さんが体を動かすなど「動作」を行うことでセンサー値を取得し、OSC通信もしくはシリアル通信を介してインタラクティブにモデルを変形させながら形を決めていく、というデザインプロセスにチャレンジしていく。
2.デザインプロセスのスキームの提案
今回は、「おじぎをする」動作で部材の曲線が曲がる角度を決めるようにする。今後は制作していく上で「動作」と「部材の変形」が密接なつながりや「動作をもとにデザインするからこそできる形」の意味について考えられるようにもしたい。
#ND3M #EMARF
— MEDY (@408321date) July 26, 2020
ブレストからでたアイデア1:「腕を曲げる」「足を蹴りだす」「お辞儀をする」時の角度によって部材が曲がるのはどうか。その場で、スライダーではなく腕を曲げながらモデルがgh上で変化させ「このくらい?」という会話が生まれるようなデザインプロセス. pic.twitter.com/9JsLlLZmWe
例えば、お辞儀をすると、部材もその角度と同じようにウネッと曲がるなど。そういった、「身体」と連動する使い方ができないだろうか‥……と#EMARF #ND3M
— MEDY (@408321date) July 25, 2020
3. スタディ : arduinoやzigsimとの連携
「おじぎをする」動作からセンサー値を取得してGrasshopper上で演算しライノセラス上でモデル変形していく。ここではセンサー値をGH上で取り扱う上で3つの方法をスタディした。
①firefly(GHプラグイン)を用いてArduinoとアナログインプット
②firefly(GHプラグイン)を用いてArduinoとシリアル通信
③zigsimとgHowl(GHプラグイン)を用いてOSC通信
*ここでは、あくまでも方向性のスタディの記録を残していくため、具体的な実装方法については別のnoteで共有します。ソースコード、マイコンとセンサーの配線など…詳細の解説については「○○制作ノウハウ番外編①(実装)」にて紹介。(2020.08.20以降公開予定)
3-1.firefly(GHプラグイン)を用いてArduinoとアナログインプット
Fireflyは、Grasshopper(Rhino用の無料プラグイン)とArduinoのようなマイクロコントローラの間のギャップを埋めるためのソフトウェアツールのセットを提供しています。これにより、デジタルと物理の世界の間でほぼリアルタイムのデータフローが可能になり、これまでにない流動性を持ったバーチャルと物理のプロトタイプを探索することが可能になります。
food4rhinoのサイトより訳
また、ヘテデュイーノというプラグインもあるみたいである。今回は使用してないが、紹介のみしておく。
ヘテデュイーノかわいい。初めて知った。https://t.co/X83l669rJu#ND3M pic.twitter.com/rYxP5Sa9jJ
— MEDY (@408321date) July 24, 2020
マイコンの一種であるArduinoのピンから直接、センサー値をGrasshopper上に送り値を扱う。
まずは、光センサの取得値でやってみた。ghにインプットし、あとはスライダーと同等と見なしてコンポネント組んだ。
— MEDY (@408321date) July 24, 2020
遅延については処理の負荷がどのくらいか分からなかったので敢えて処理速度落とした。もう少し早くできるはず。#ND3M #EMARF pic.twitter.com/wZOaP3bvNc
arduino側でセンサー値を取得しその値をarduinoIDE側で特に演算せずそのままGHで演算できるのであればこの方法が一番簡単そうだ。しかし加速度センサーなどGH側でコンポーネント組むよりもarduinoIDE側でキャリブレーションしたほうが楽な場合についてはどうしようか、ということでスタディ2にはいる。
3-2.firefly(GHプラグイン)を用いてArduinoとシリアル通信
シリアルモニター上での数値をGHのパネル上に送りデータとして扱う。
#アイデアブレスト #EMARF #ND3M
— MEDY (@408321date) July 25, 2020
加速度センサーの値をシリアル通信でリードしgh上で扱う。
ここからは家具のデザインに入り、「間隔」「密度」「角度」「フィレット径」「高さや厚み」などを変えられるようにするところを目指す. pic.twitter.com/Urrg6LhlEa
加速度センサーのように(今回はMPU6050を使用)、取得値をそのまま使うのではなくキャリブレーション(物理演算)をして自分が欲しい値に変換してから取り扱うものは、GH上でコンポーネント組むよりもarduino上でソースコードを用いたほうが早いため、シリアル通信をしたほうがよさそうと考えたためこの方法をスタディした。
しかし、わざわざマイコンを用いなくても加速度・ジャイロならスマホでも取得できるのでスマホセンサーを用いたほうが良いかもというリファレンスを得たためzigsimを用いたスタディをした。
3-3. zigsimとgHowl(GHプラグイン)を用いてOSC通信
『ZIG SIM』『ZIG Indicator』は、スマートフォンに標準で内蔵されている各種センサを利用することで、迅速なプロトタイプ開発を可能にするアプリケーションです。
ZIG SIMのサイトより引用
今回はZIG SIMを用いてスマホセンサーでGH上のモデルを動かせるようにした。
メンバーからのリファレンス3
— MEDY (@408321date) July 25, 2020
arduinoやesp32でやるといろんなセンサー扱えるけどスマホにも搭載されてるセンサー値ならスマホ使ってWSやれば良いのでは…?という指摘からスマホセンサーで同じことをやってみた.#ND3M うーん.そろそろ家具のデザインしたいのだけど…ついつい遊んでしまった。 pic.twitter.com/x2RNbRFjen
3-4.リファレンス
これらのスタディを経てメンバー間で出たことをまとめる。
・センサー値がこまめに変動するので、ボタンか何かをハード側につけ、好きな値のところでボタンを押すをセンサー値の取得がストップし、その状態のモデルでシェイプを確認できるように実装したらどうか
・ソーシャルディスタンスを保った参加型(身体を動かしながらの)デザインワークショップをするためにghを離れたところから自由に操作できる自作コントローラーを作るか…という結論に。
・例えば、ランプの傘の部分。ルーバーの密度、ランダムにあける開口の数などを、部屋や使う場所に応じて、照度センサーもしくは光センサーの取得値でパラメトリックに形状を決められるなど…はどうだろうか。
・webカメラ使ってモーションキャプチャーしてやれないか‥‥unity上に読み込んで‥…というアイデアもあった。アンバサダーの役割としてスマホアプリとghだけでできるような手順にした方が「真似したい」と思ってもらえるのでは‥という議論に。ターゲットをどこにして企画するか考える。
4. まとめと次回予告
今回は、「参加型ワークショップ」にするための実装方法やシステムをブレストしていったことをまとめた。次回は、実際にデザインをしていきEMARFで発注するところまでのノウハウを共有するのでお楽しみに!
#ND3M #EMARF #エスキス
— MEDY (@408321date) July 26, 2020
一時は、やりすぎだ‥……というところまで走ってしまったものの‥……シンプルな曲線の組み合わせに。テーマとして「体を動かしながらデザイン検討しよう」があげられ、フィレット径,曲線の傾き,厚み‥…などの要素をスライダーではなく使う人が動きながら決めていく. pic.twitter.com/Shp79SLtLa
第2回はこちら
この記事が気に入ったらサポートをしてみませんか?