運動の自由度問題

このキューピーの人形には関節が3つしかありません。動くのは左右の肩と首の部分。右側の肩関節を動かして腕を挙げることで、右手を前に伸ばすことができます(やや外側にしか挙げられませんでしたが、、)。この人形を使って同じ姿勢を作る時、動くパーツのバリエーションはほとんどありません。これに対し、わたし達が腕を前へ伸ばそうとした時には、肩関節だけではなく肘、手首などのたくさんの関節が動きに関わります。これに加えて胴体にある背骨や肋骨の関節も動き、さらには股関節も..と考え始めるときりがありません。
関節には肘関節のように屈曲・伸展の方向にしか動かないものと、肩関節のように屈曲・伸展だけでなく内転・外転、そして内旋・外旋の方向に動くものがあります。工学の領域では、制御のために決定すべき変数の数は自由度と呼ばれます。つまり、肘関節のように動きの軸が1軸のものは運動の自由度は1、肩関節のように動きの軸が3つあるものは運動の自由度は3とされています。腕を動かす時を考えてみると、肩関節(3)+肘関節(1)+前腕(橈尺関節(1)+手関節(2)で合計7の自由度があります。肩関節は◯度、肘関節は◯度..と一つずつの関節とそれを動かす筋肉に対して別々に運動プログラムをして指令を出していてはとても時間がかかってしまい動きがぎこちなくなってしまい、スムーズには動けません。
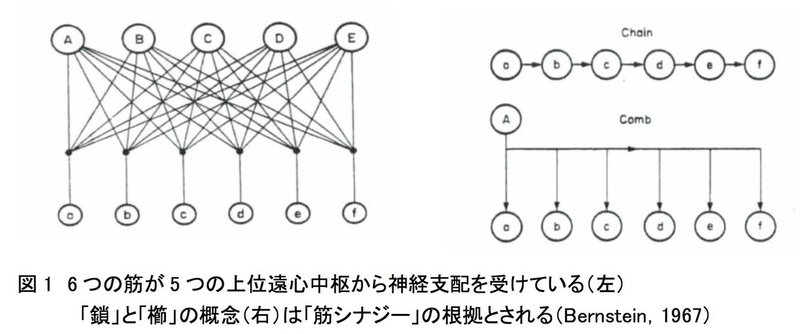
従来の運動制御理論(脳が個別の筋肉に対しそれぞれに運動の指令を出し、末梢の筋肉を活性化することで運動が起こる)に対して異論を唱えたのがロシアの運動生理学者ベルンシュタインでした。身体運動が起こる時に生じる「運動の自由度問題」と「文脈の問題」に対し、ベルンシュタインは「シナジー」がその解決策であると考えました。シナジーとは「身体各部位(要素)が連携し、 協調することによって、運動の自由度を減らすような機能的な構造・単位のこと」であり、腕を曲げる筋肉群・伸ばす筋肉群など、身体の機能によって筋肉群が協調して働くことで運動の自由度を減らし、自由度の問題解決を図りました。

自然に目を向けてみると、自律的に協調をしている例があります。たとえば鳥が群れで飛んでいる時、急に方向転換をするとなってもリーダーが指示を出しているわけではありません。鳥や魚などの群れは①接近(仲間の方へ集まる)、②併走(お互いに同じ速さで動く)、③衝突回避(ぶつからないようにする)という3つのルールにより、自己組織的に秩序だった集団行動ができるそうです。このような自律的なふるまいを身体にあてはめ、環境がもつ特性と身体がもつ特性との相互作用によって運動が決まるとしたのが、ギブソンの生態心理学です。ギブソンは「われわれは動くために知覚するが、知覚するためにはまた、動かなければならない」としています。これが知覚行為循環論を表しています。
<参考文献>
ニコライA. ベルンシュタイン(2003)『デクステリティ 巧みさとその発達』
児玉 謙太郎(2013)身体運動研究における“Synergy”概念とその射程
J.J. ギブソン(1986)『生態学的視覚論ーヒトの知覚世界を探る』
この記事が気に入ったらサポートをしてみませんか?