
お返事ロボ バサ公 を作ってみよう!

こんにちは、ユカイ工学のkurikitチームです!
2020年6月より続いていた、女子美術大学 × ユカイ工学kurikit 『ユカイなロボット開発プロジェクト』。
今回は制作作品の中から、『お返事ロボ バサ公』のつくりかたをご紹介します!
工作レベル:★★★★
制作時間:約16時間
材料と道具

・ユカイな生きものロボットキット
・ココロキット
・追加の結束バンド
・フェルト
・刺繍糸
・綿
・グラスアイ(編みぐるみ用)
・手袋
・ネイルチップと白マニキュア
・スナップボタン
・ハサミ
・造花の茎
・カーテンフック
作り方
1. 型紙作り・裁断・縫製
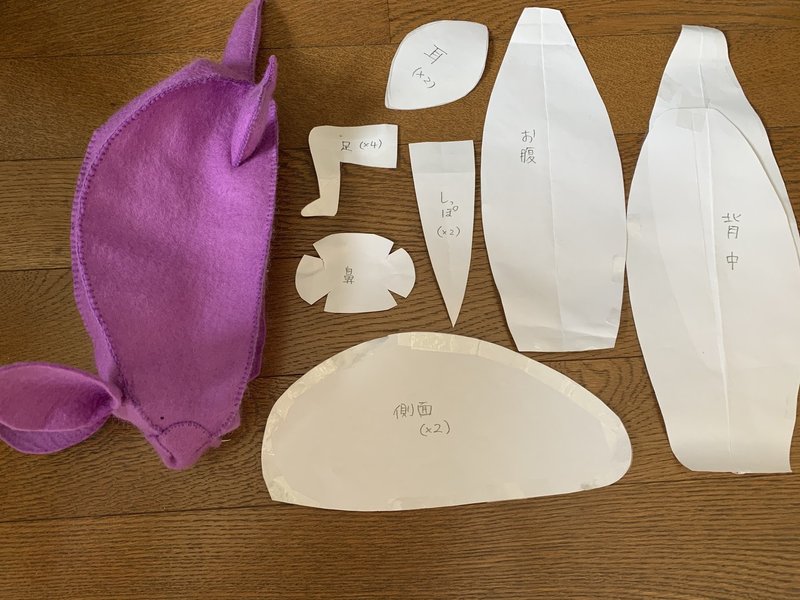
型紙を作ります。

紙で模型を作ってみるとわかりやすいです。
できたらフェルトを裁断し、縫っていきます。

初めにお腹・背中・側面を縫い合わせます。この時、口までは縫いません。
写真は試しに目を置いて綿を入れてみています。
2. パーツを付けます。
耳・足・しっぽ・目・鼻とキバを付けていきます。
まずはキバ作りです。

ネイルチップを小さく切り、白いマニキュアで着色します。
着色は絵具でも大丈夫です。
次に鼻を立体的に作り、それにキバを縫い付けます。
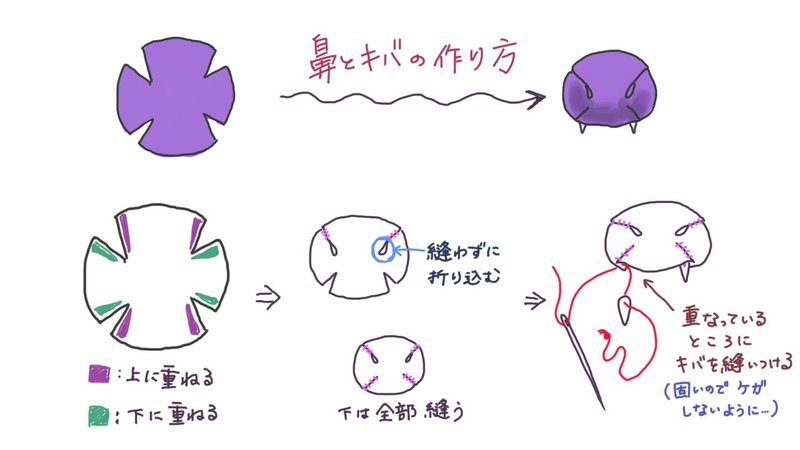
体にパーツを合体します。

耳・足・しっぽ・目は、つける位置を決めたらハサミや針で穴を開けて差し込みます。

この時も口は完全に縫い閉じません。完成した時に口を光らせるためです。
ここまで出来たら、一度お腹を切ってスナップボタンを付けます。

ここから電池の出し入れやスイッチのオンオフをすることになります。
3. 羽を作ります。
結束バンドで羽の骨組みを作り、骨組みに合わせてフェルトを裁断します。
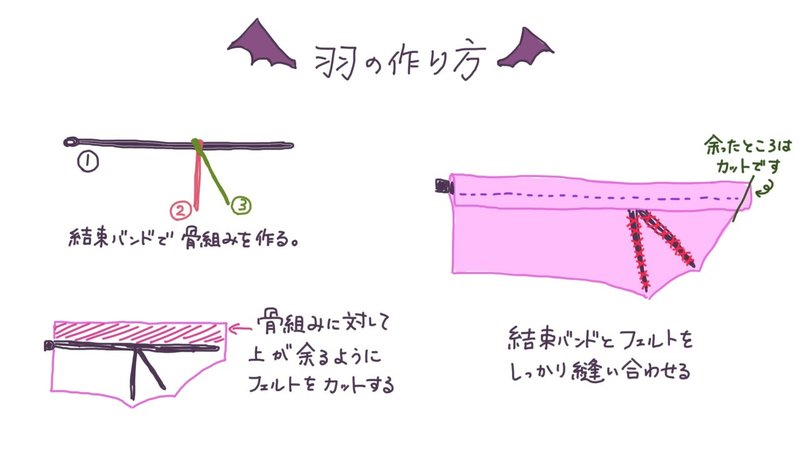
フェルトと骨組みは図のように縫い付けます。

縫い目はキレイに、可愛く!
4. モーター・ココロキットと綿を入れます。
体の中にモーター・ココロキット・綿を入れます。

ただしそのまま入れるとモーターが綿に絡まってしまうので、綿は袋に詰めます。今回は手袋を使用しました。
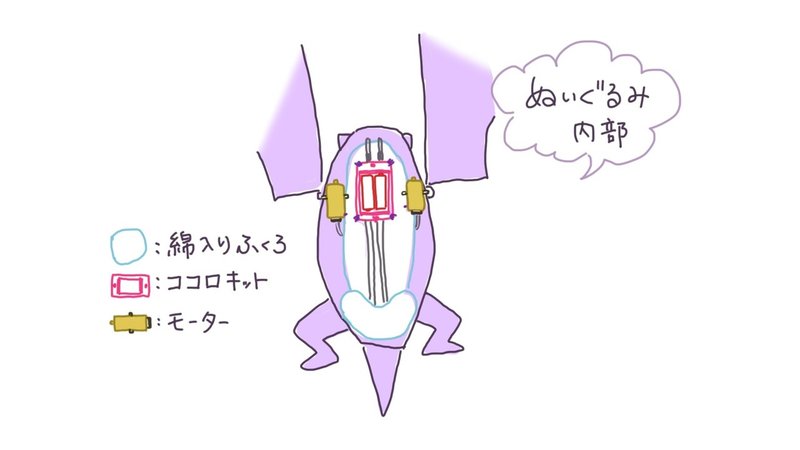
綿の入った手袋を体に入れ、羽をつける位置を決めます。
確認できたら袋にモーターとココロキットを縫い付けます。
ココロキットはLEDが口側にくるようにします。
5. 体と羽を合体!!

内部のモーターの位置に合わせ、体の左右側面に穴を開けます。
穴からモーターを出したら外側から羽をつけます。
羽がモーターから外れてしまう場合は接着剤でつけます。
ここまででバサ公本体は完成です。
6. プログラミング

Scrachを使用してプログラミングしていきます。
音が50以上の時 LEDが赤く光り、モーターが回転するように設定しました。
7. 仕上げ・実践
最後に、バサ公を吊るします。

まず棒にフックをつけたものを用意します。
写真は造花の茎にハンガーフックをつけたものです。
これをバサ公の体に縫い付けます。
できたら家の中、好きなところに吊るしましょう!
音にバサバサ応えてくれるバサ公の完成です!!
製作者:MARIAH (女子美術大学)
この記事が気に入ったらサポートをしてみませんか?