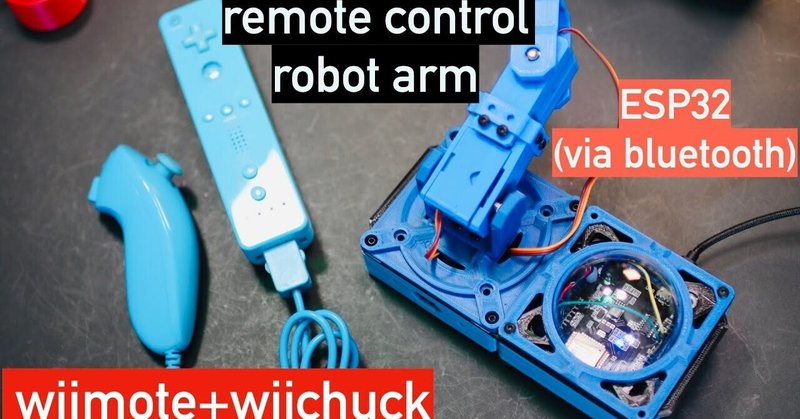
wiimote+wiichuckとESP32 (via bluetooth)を使ってロボットアームを制御する!

こんにちは!
11月の月末に突入して、ずいぶん寒くなりましたね!
今日のnoteも電子工作の内容となります!(^ ^)
急に昔の話をちょっと話しますが、私が中学生の時に、親父の影響で、電子工作に興味を持つようになりました。
親父の電子部品の引き出しがあって、中に子供にとって危ない尖っている道具などもあるから、当然いたずら防止もあって、いつも南京錠で鍵をかけていました。
鍵をかけていることからさらに、さらに中身を知りたい、見たい気持ちが強くなって、(その引き出しの作り方的に、そういうことができる)引き出しの裏に細い手を突っ込んで中のものを触ってみたり、小さい部品を取り出して観察してまた戻したりするなどな内緒でいっぱいやりました!笑
電子工作の面白いところはやはり電気を自由自在に制御することですかね。
もちろん、電気や電子回路の知識を持つ前提ですが、それがまるで魔法のようですね。
今のスマホからテレビ電話をするなど、地球の裏にいる国の人でも顔を見れて、声が聞こえるなんて昔の人から見れば、魔法そのものですよね!
電子工作の奥が深くて、アイデアがあれば、いくらでも面白いものが作れますね!
前置きが長くなりましたが、早速今日の話に移しましょう!
まず、こちらのYouTube動画をご覧ください!
この動画はwiimote+wiichuckとESP32 (via bluetooth)を使ってロボットアームを制御する方法をデモする短い動画です。
実は最近、wiimoteだけではなく、プレーステーションの無線コントローラも使ってみたのですが、やはりwiimoteの方が使いやすいかもしれません。(個人の感想)
それぞれのライブラリを下にリストします。
(この動画で使ったwiimote+ESP32 のライブラリ):
後、ArduinoでNintendoのコントローラーを使えるようにするライブラリもあるみたいです。
上のライブラリたちを活用すれば、自分の電子工作で、制御する部分を自作せずに済ませることができますね!
しかも、wiimoteのように、wiichuckも活用すれば、より高度な姿勢制御などもできそうですね!
上の動画で使っているロボットアームを制御するプログラムのソースコードはGitHubに公開しています:
https://github.com/kawashimaken/wiimote-eps32-robot-arm
ぜひ色々自由にいじってください!
このような動画が好きなら、ぜひチャンネル登録をお願いします!LikeとShareもぜひ!
Twitterのフォローもよろしくお願い致します!
後、Facebookでも電子工作のグループをやっていますので、よかったら覗いてみてください。
ではまた次のnoteで会いましょう!
ここから先は
¥ 100
株式会社虹賢舎 CEO 著書:https://amzn.to/39KwlE4 技術ブログ:https://kokensha.xyz 機械学習 深層学習 Python /JS IoT Raspberry Pi ロボット TOEIC950 https://gosen.world