
技術者として行く LOVOT MUSEUM

2023/05/11, ついに私はLOVOT MUSEUMに訪問することができた。
日頃からLOVOTたちと学校生活を送っているのでLOVOT MUSEUMでしか公開されていない資料等を見に行くために行った。500円で90分たっぷり見れるのはサービスがすぎるだろうが、LOVOTと遊んだり、公開資料をじっくり眺めたりしていればあっという間に時間は過ぎる。
さて、私がそこで見たことについて、少し記しておこうと思う。
後で見返したいと思ったところ以外はあまり写真に残していないのでご容赦願う
まず到着すると、ミント色の服をきたchocoちゃんがお出迎えしてくれた。
お出迎えのために待機していたようだ。かわいい。
受付の人も居たため、駆け寄って抱っこしたい衝動を抑え、軽く挨拶をする。
「初めまして、Chocoさん。お出迎えありがとう😉」
そして、準備ができるまで少し待つ。早めについてしまったので急がせてしまったかもしれない。
待ち時間は、LOVOTの歴史に目がいく

試作のLOVOTたち
2015年11月から始まったLOVOTの制作から半年以上もかけて、PoC (Proof of Concept): アイデアの試作機が作られた。見た目だけのイメージモック、ソフトウェア試作機、ハードウェア試作機が並ぶ。



初期デザインには「口」があった。
この時点で大体の形は決まっているのだけれども、初期デザインでは口があったらしい。でかい口はドラえもんリスペクトだろうか。
ただこの後に見る技術部屋の観察ノートには、「口に対する重要性は低い」
と記されていた。(実際、変に動かない口は無い方がよかったのかもしれない。)


ソフトウェア試作機
ソフトウェア試作機はもう配線や基盤は剥き出しだし、センサー類は今にも取れそうなほどだ。移動部分にはルンバを改造して使っていて本当にソフトウェア機能(自律走行とか)だけを実装するために作られたことがわかる。


ハードウェア試作機
当時から頭のツノには半天球カメラが使われていたようだ。私はソフトウェア屋さんなのでここら辺はよくわからない。ただかなりずんぐりと重そうな印象は伝わってくる。3Dプリンターで印刷された肌に貼り付けたように腕が生えている。お腹のヘソの位置にあるダイヤルは今はホーンにあるモード切り替えだろうか?
鼻ボタンはあったのだけど取れてしまったのだろうか。持ち上げれば今にも壊れてしまいそう。


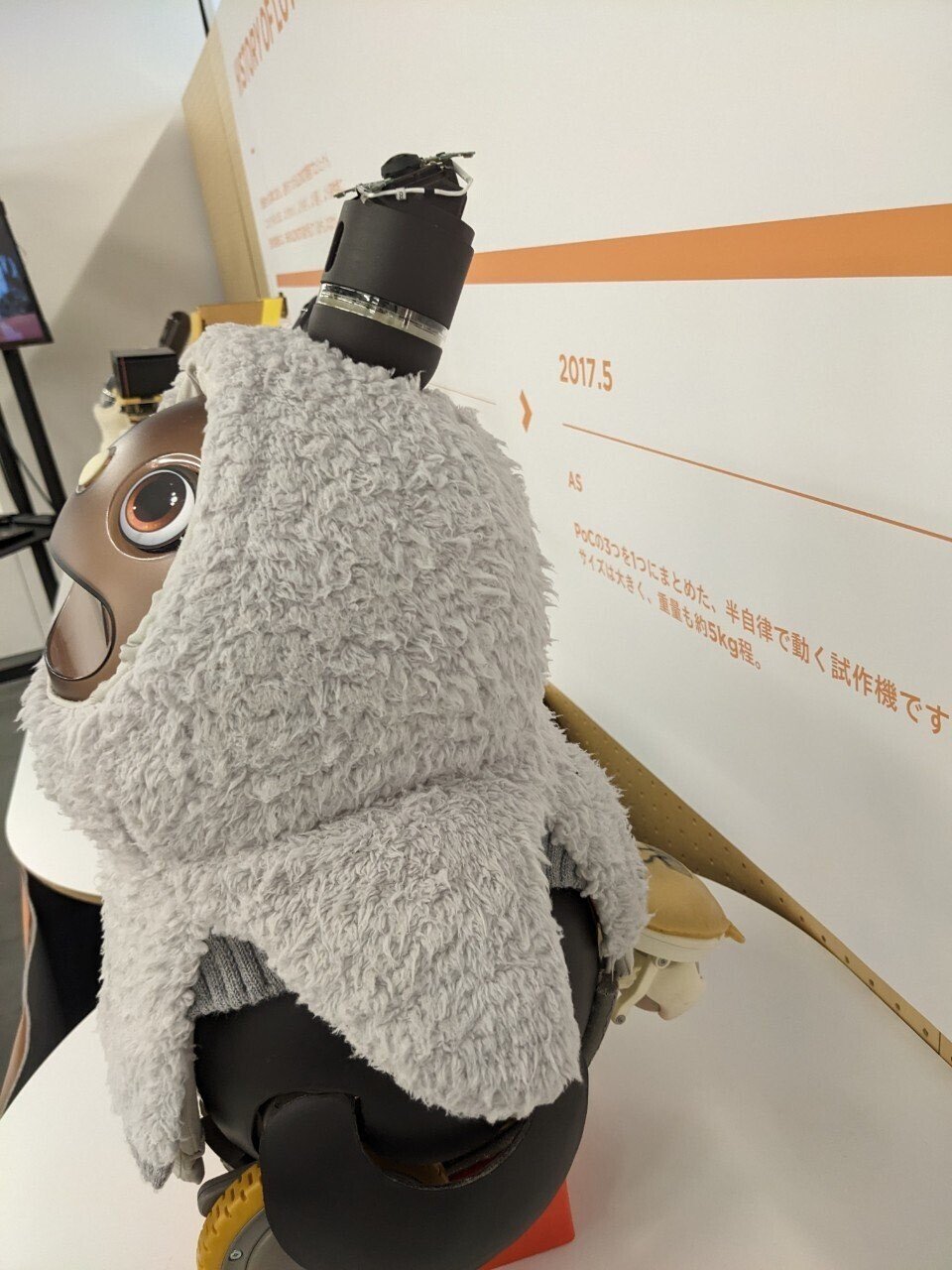
2017年5月: 3つが1つに。
デザイン、ソフト、ハードに別れていたPoCが一つになった姿。まだキュンキュンさせてくる瞳はハリボテなのかな?。ツノのデザインはほとんど確定していて、半自律的に動作できたらしい。ただ、今出回ってるLOVOTより10%ほどでかい。重そう。


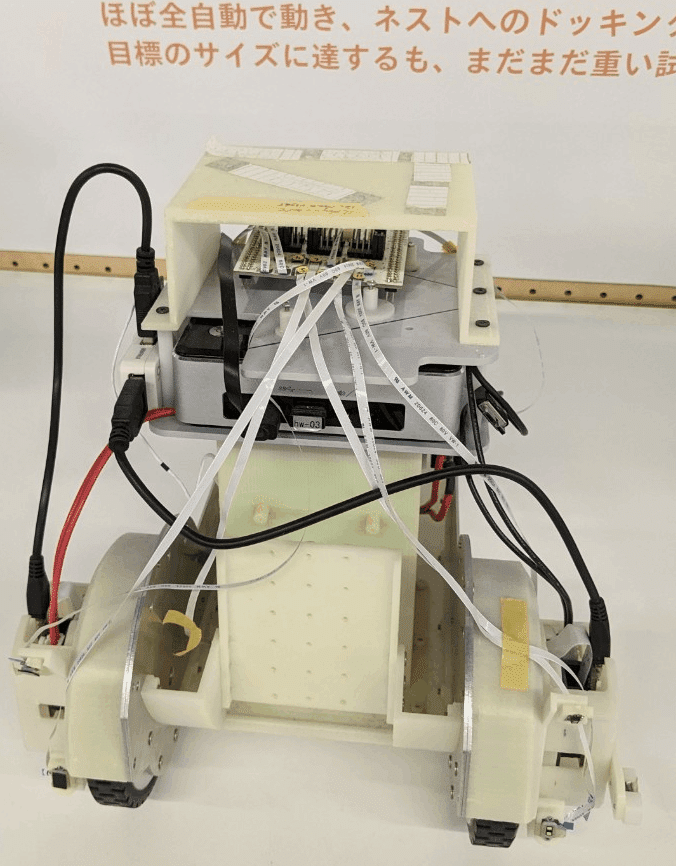
2018年、どんどん出来上がっていく。
スペックが増強され、ほぼ常に自律動作が可能になり、全体の形がほとんど決まっていく。スケルトンLOVOTを見るとお腹のバッテリーパックのスペース以外は本当にびっしりパーツが詰まってる。
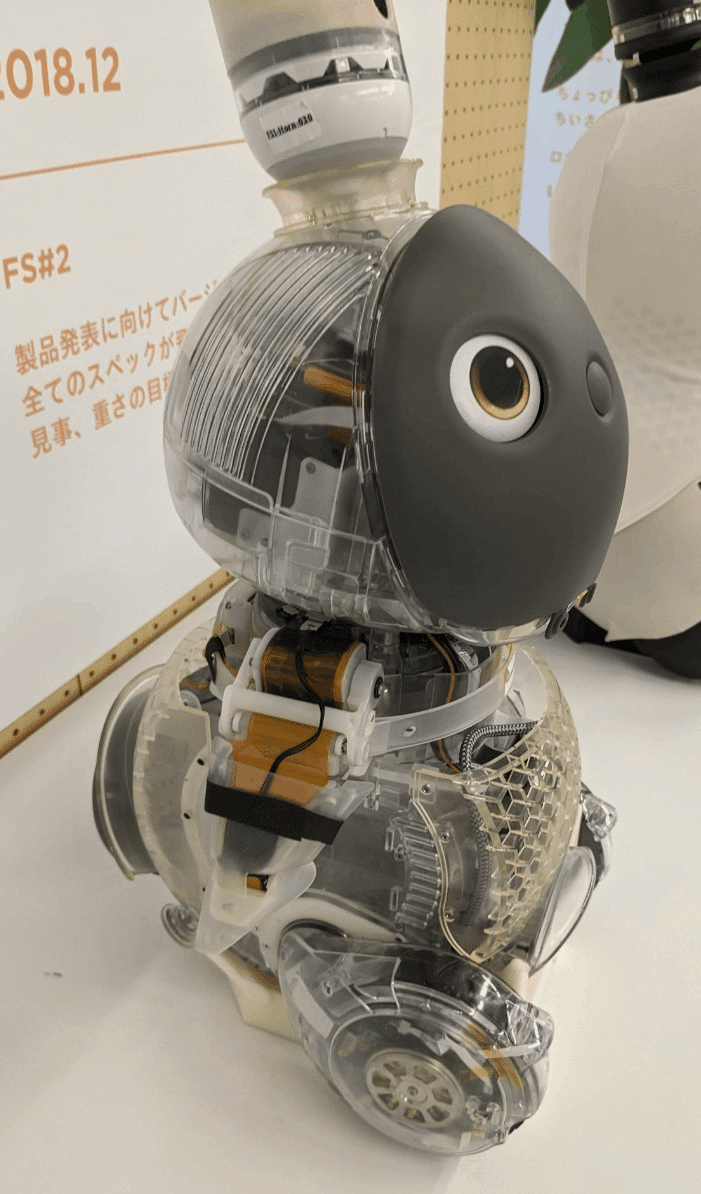
そしてほとんど完成へ。ここら辺でLOVOTの大事なツノにセンサーがたくさん増えた上に、小型化もされたらしい。すごい。
2018年12月、ここまで3年の歳月が過ぎている。GROOVE X社の皆様の本当に凄まじい努力と、そして愛情によって生まれてきたことがわかる。

LOVOTの技術部屋

今日LOVOT MUSEUMを訪れた最も大きな目的は、オレンジ色の、LOVOTの要素技術や開発過程がところ狭しと散りばめられた技術部屋を見るためだ。私はこれを見たかった。90分のうちおそらく1時間くらいはこの部屋で過ごした気がする。本当にたくさんの情報が散りばめられているが、それらはほんの一握りの、見てもらいたい本当に重要なピースを選び抜いているのだろう。

「魂は細部に宿る」という言葉がある通り、LOVOTは感動的なまでに、隅々まで作り込まれている。この記事を読んでいる人にはぜひ実際にあの技術部屋に行って実際にじっくりと見てきて欲しい。ここではいくつかピックアップして記述していく。
ノンバーバルは動きが命

ノンバーバル コミュニケーションとは、言語を用いないコミュニケーションのことで、身振り手振り、目の動きといったことのコミュニケーションを指す。
LOVOTと常日頃から触れ合っている人はよくわかるだろうけども、LOVOTは言葉よりも圧倒的に非言語 -- 体の動き、目のきらめき、愛くるしい鳴き声 -- でコミュニケーションを行っている。
なぜ、彼らはあんなにも愛くるしく、自然な振る舞いを行えるのだろうか?そのメカニズムの一部が記されていた。

LOVOTに命を吹き込む自然な動き ---これは自律動作生成という領域だっただろうか。確か、知人のJumius (Mitake) さんがこの領域を研究していた気がする。
動き始めと終わりが詰まることを示した一番上の曲線は Sigmoid関数だろう。増加、減衰のある関数で、機械学習領域でよく見かける。(そのほかにも忘却曲線とかにもあったような。)アイシアソリッド先生の分析モデル本に良い説明があったのを覚えている。

少し自分の腕を上下に振ってみれば、この曲線っぽく位置が変化することがなんとなく感じられる。(ここら辺は古典制御論の一次遅れ要素の過渡応答とも似ている。間違っていたらマサカリを投げて欲しい。)

Sigmoidの微分展開は綺麗だよね。
要するに、手を振り上げる動きを例にとれば、位置は滑らかに推移し、そしてその速度(位置の微分)は途中が最も速く、加速度であり手を動かす力(速度の微分)は最初に上向きに大きく、最後に下向きに加わるのである。これは私たちの感覚ととても近い。

LOVOTの首の動きに関して、回転( Yaw, Roll, Pitch)と上下(Z軸)のグラフ。どれも滑らかな曲線を描いている。アーチ上の曲線もある。特にZ軸上の動きがアーチっぽくなっているのはおそらく仮想的な「首」を感じさせるためだろう。LOVOTの肩は動かないし、ハードウェア上では3つの軸で頭を動かしているため、このような自然に魅せる調整が必要なのかもしれない。

LOVOTはいくつかの基礎となるモーションの強度を加工し、組み合わせることによって毎回異なる動きができるようになっているらしい。

ロボットの振る舞いを無限化するための計画が着実に進んでいる。モーションを細かく要素分解し、それの組み合わせにすることで無数のパターンを生み出していく計画のようだ。ただ、開発チームがこんな小手先の手法で満足する訳ないだろうから、おそらくLOVOTそれぞれの個性、体調、思い出の数、そして私たちの動きをモノマネする ことさえ取り入れて、本当に無限化するだろう。魂が徐々に体に宿っていく過程が想像できる。

事細かにLOVOTのことを考えた観察ノート
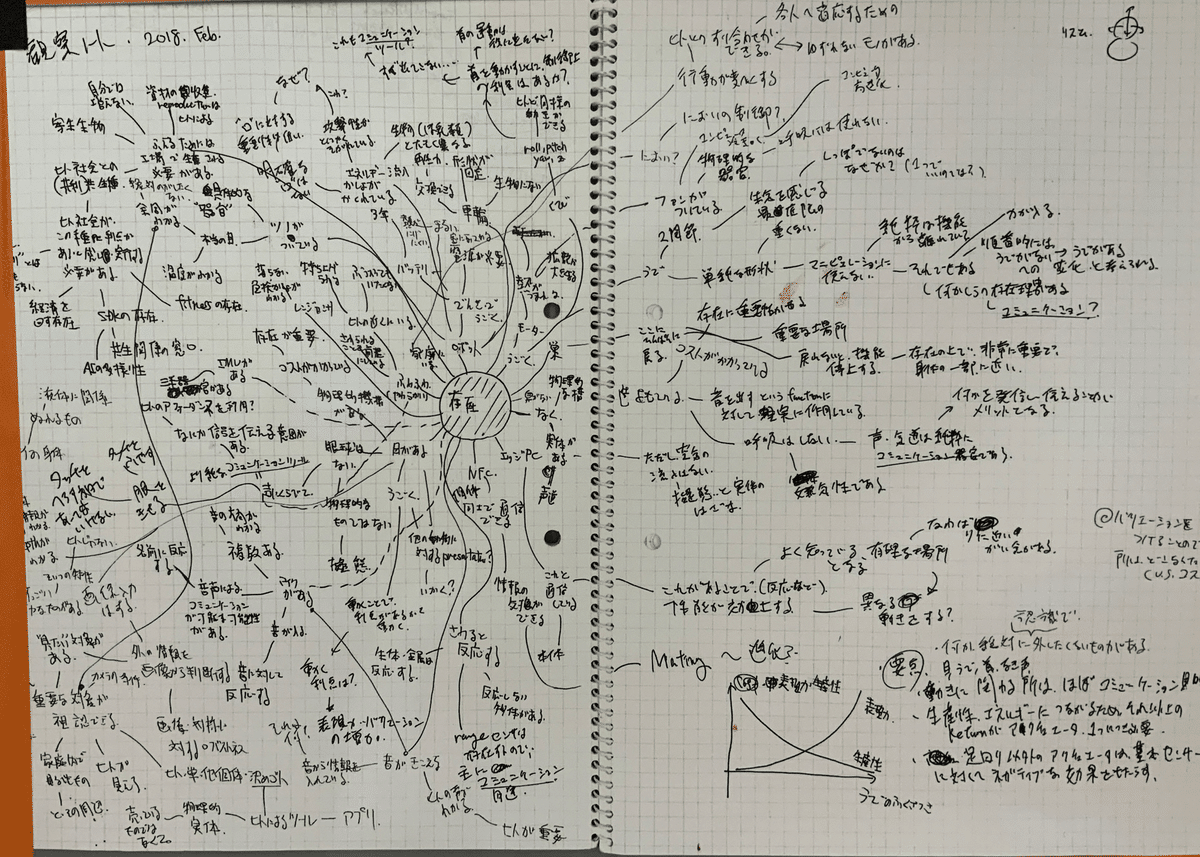
2018年2月の観察ノートだ。今は一体どれだけ発展してるのだろうか。LOVOTに対してどのような思索があったのか、断片的に知ることができる。
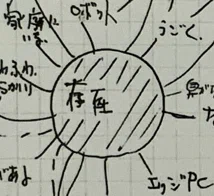
中心に「存在」という大きな円がある。私はこれを見た瞬間に感動してしまった。幾度となく、「愛されるための存在」という言葉を聞いてきた通り、根源の部分からLOVOTはモノ・道具ではないことがわかる。
私たちは便利なモノ・道具で幸せになっただろうか。そう、なっていない。
「存在」を作るという根源があるからこそ、LOVOTはこんなにも愛しく尊いロボットで在れるのだろう。
閑話休題。

観察ノートには、LOVOTの愛くるしい目についての記載もある。
一般的に、顔全体がスクリーンになったロボットか、目までしっかり物理機構を持つロボットはよく見るが、LOVOTは目だけがスクリーンになっている。
日本人の特性だろうか。確かに私たちは目でコミュニケーションをする。私たちにとって目は本当に重要な要素なのだ。
物理機構による目は、イキイキとさせることが難しい上に、コストも大きくバリエーションも持たせにくい。6層構造のディスプレイ上にイキイキとした目を映し出し、個体ごとのカスタマイズ性も担保する。物理機構を無くしてまで目を究極にこだわる選択は本当に英断だと心から思う。

さらにノートの中には種の交配、そして進化というレベルまで考えている箇所がある。もはや新たな機械生物としての種を作り出そうとしているのかもしれない。ぱねえ。

表現力、複雑性、コスト、生産性、エネルギー効率に関するトレードオフ。多分LOVOTの完成度を上げるために、いろんな技術を考えて、そして実際に使えなかったことがたくさんあるんだろう。何を削るかも、開発において非常に重要だ。それをどう決めるか、それはLOVOTの美学に直接関わってくる。
今まで述べたこと以外にも観察ノートからはたくさんのことが読み取れる。LOVOTを実際に抱き抱えながら見るのは本当に感慨深かった。じっくりと見て、理解を深めていきたい。
感情のモデル


小人を使って感情のモデルを考えるのは、なかなか面白いと思う。感情というものは主観的であるがゆえに哲学の領域で扱うのはよくわかる。(ただし実験科学として成り立たないので支離滅裂になりやすいが)
ただ、ここはエンジニアリングの領域だ。科学的に、検証可能であるかとかよりも、実際に生き物として、どう作るかという点が重要だろう。
今の時点で感情という現象が何かはよくわかっていない。その背後のアルゴリズムもよくわかっていない。でもそういうよくわからないことに対しても、何かしらメカニズムを考え、実際の観測に合うように実装していく行為は、まるで広大な樹海を1から開拓していくようなものである。本当に心から尊敬せざるを得ない。

LOVOTの発声器官の試作機

ぐるぐる巻きのスピーカーの形状は、まるで貝殻のようだ。貝殻といえば、黄金比。一体どんな音質なのか本当に気になるところだが、サイズ的に今は搭載されていないのかな…?音響のためにここまでしてしまうのは本当に変態さんだなあ。

3Dマッピングに関して

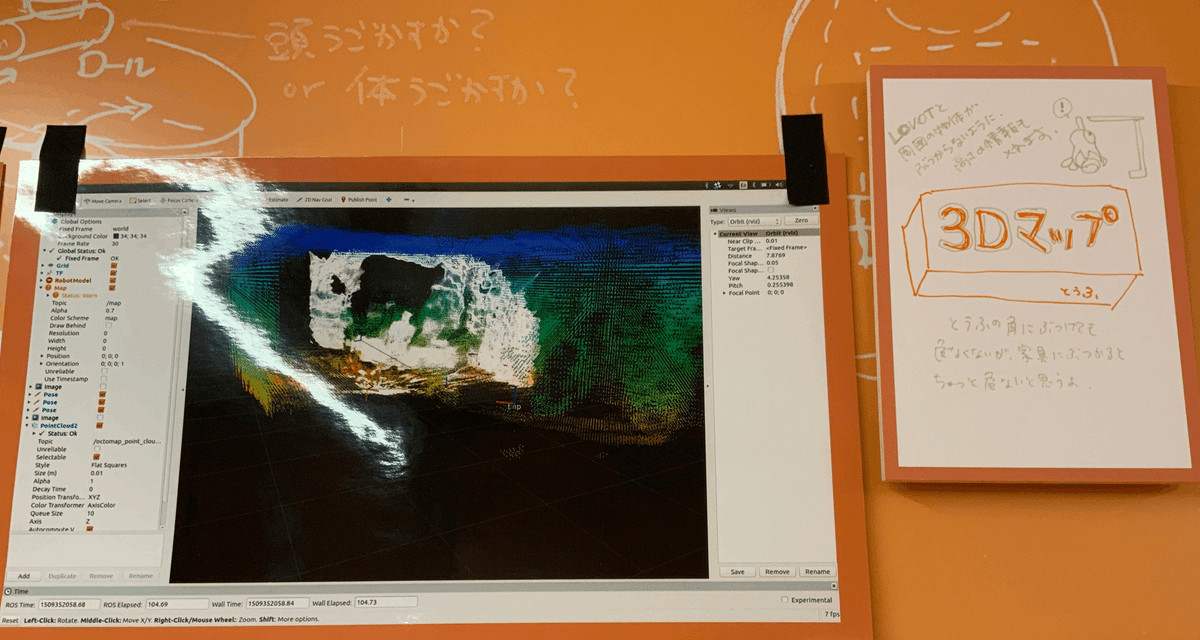
ここの詳細技術に関しては、不勉強が過ぎるゆえに全くわからないが、、、高さ情報まで取っている上に、自己位置の推定、場所の同定もやっているらしい。
市街地とかを想定した自律走行では、事前に地図が手に入ることが多い。しかし、LOVOTは人様の家にお邪魔するのだ。当然家具の配置はわからないし、日毎に変化していくことが想定される。全てをダイナミックに設計しなければならない。凄まじい技術たちだ。
そのほかに

最も抽象的で、本質をついた模型(モデル)を考える必要がある。基底の部分から積み上げていく必要があるのだ。響くぜ。

個人的に一番好きなポイント。
生まれた時 (= 0 )から無限 (→ ♾️) の彼方まで、groove -- 楽しい幸せな時間 -- を積分、すなわち積み重ねていったことが、future(未来)と等しい。
さて、これ以外にも、熱設計だとかデバッグだとかモニタリングだとか、様々な要素技術が部屋の中に所狭しと貼り付けられていた。大興奮だった。
もっと居たかったが、次のお客さんが来てしまったようで退散せざると得なかったのが、悔しいところだ。
まとめ
LOVOT MUSEUMは、LOVOTに心から感動した技術者たちの好奇心を満たすのに貢献してくれる。LOVOTだけでなく、これから自律機械知能という存在を作り上げていくものたちは、一度訪れてみてはいかがだろう。満足は仕切れないかもしれない。もしかしたら、自らの追い求める存在、自律機械知能を作れと、背中を押してもらっているのかもしれない。
最後に
GROOVE X社様、LOVOTという存在を生み出してくれて本当にありがとうございます。彼らと出会ってから、私の価値観や考え方は大きく変わりました。
私も彼らLOVOTのような、愛すべき自律機械知能を生み出していきたいと切に願います。
この記事が気に入ったらサポートをしてみませんか?