黒猫のLive2D研究レポート 【ジャンプモーションについて】

暇すぎてやることがない黒猫のLive2D研究レポートである。
■基礎的なジャンプの原理
ジャンプをするという行動をするためには
元の位置
足に力を入れるために屈む
脚で地面を蹴る
地面から離れる
空中で勢いが止まり手足が拡がり、下に落ちる
地面に着地
勢いを止めるために屈む
元の位置
にする必要がある。
■ジャンプの物理演算とアニメーションのデメリットとメリット
一連の動作を細かくアニメーションを付ける場合は原理を元に手足や物体の構成をする事が出来る。
両足でジャンプしても一般的には片足が先に着地するのが現実的だし、トラッキングの場合、踏切や着地を大げさに予備動作や慣性を作ることが出来ない。
簡易説明
丸で例を挙げるが上に行く時と下に落ちる時とで重心位置が異なる
トラッキングで動作させる場合は振り子の繰り返し動作になる

つまり動作として現実的な矛盾が生じる可能性がある。
もちろんY方向の手足や服の揺れ等バウンド系で予備動作や慣性を補完するのだがトラッキングでリアリティを追及する事は難しいと考えられる。
キーバインドでリアルなジャンプを目指すか、トラッキングでリアルタイムにジャンプさせるか選択と言えよう。
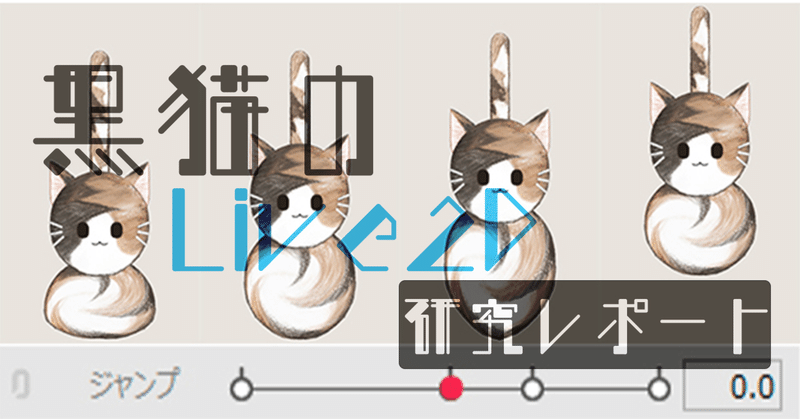
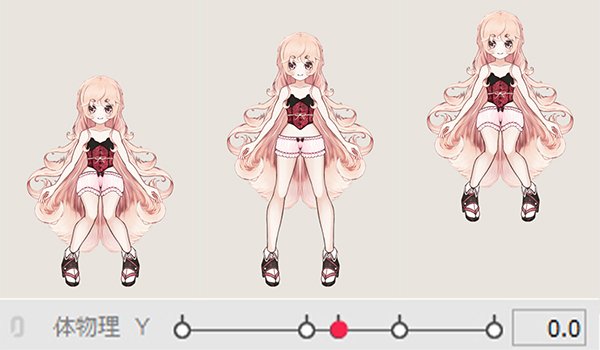
■パラメータと物理演算の構成
上記の事を踏まえるとトラッキング動作させるモデルに関しては上下するモデル動作の最大値を±にする事で事足りる。
-値をしゃがみ+値をジャンプの頂点にすることで大まかに基礎的なジャンプの構造が出来る。そのジャンプの動きに連動してY方向の揺れの作成をする必要はない。モデルを軸に拡縮に動く形、特に髪や腕など頭の動きに連動すれば良い。
制作に際して判明

上の画像の状態でトラッキングに追従させてしゃがみとジャンプが出来るが問題が発生。
トラッキングだと入力がゆっくりになることが多く、ゆっくり追従するとガクガク震えだす事が解る。

試行錯誤した結果
パラメータの中間に動かない部分を作るに至る、ジャンプ用のパラメータが動かなくともトラッキングとY方向の揺れは動くので問題がない。
逆に常に揺れてても問題ないものはジャンプの合間に地面に設置した状態の伸びをはさんで良い。

物理演算の構成
ジャンプ用のパラメータはゆっくり動く方が滞空時間が伸びる、またトラッキングの入力から出力に変わるのを遅らせることでジャンプを一番最後の揺れにする必要がある。
トラッキング【頭・体】
Y方向の揺れ【腕・髪・服】
ジャンプ【足】
の順でトラッキングとY方向の揺れが予備動作や慣性で生じる動作となると考えている。


■Vtuberモデルでのトラッキングによるジャンプの必要性
結論から言えば1、2頭身のモデルには表現の幅が拡がるのでアリだが、人の頭身だと上半身しか映さない場合が多く、体の上下運動は上半身だけでも効果はあるのだがジャンプしてるかどうかを判断することが出来ないのでナシと言える。
必要性がどこまであるか考えた上で活用することを勧める。
以上【ジャンプモーションについて】
■参照モデル

--------------------------------------------------------------------------------------
漆黒の絵描きLive2Dクリエイト野良猫
|twitter|skeb|nizima|
--------------------------------------------------------------------------------------
この記事が気に入ったらサポートをしてみませんか?